Lecture 01 & Reading 2.1 线性方程的几何理解与矩阵
2.1实际上是讨论了对简单的n个方程n个未知数的两种不同的视角:row picture, column picture, 并且介绍了方差与矩阵之间的关系
我们首先看一个 两个方程两个未知数 的情况
row picture的视角是 我们之前所学过的 two lines meeting at a single point(the solution).
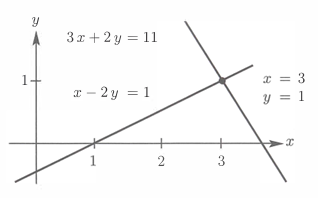
这其实是一种数形结合的思想吧,满足x-2y=1方程的所有点的几何在xy平面上表现的形式其实就是一条直线,同理,3x+2y=11也是一条直线,那么两条直线的交点的坐标就是既满足x-2y=1又满足3x+2y=11的(x,y) 也就是方程的解
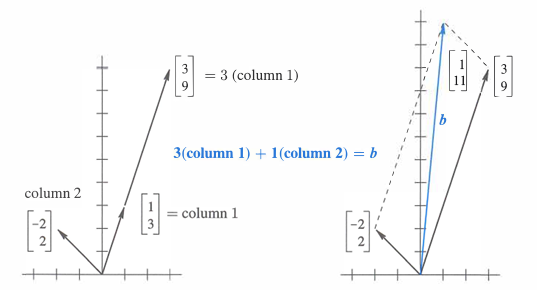
column picture的视角是从 "vector equation" 的角度
而这种若干向量按比例相加其实就是向量的线性组合
我们不难发现这个组合的结果应该是(3,1)
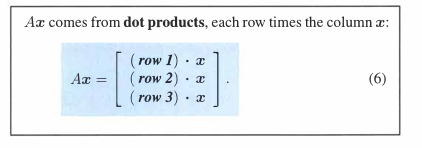
我们把方程左边的向量排列 叫做 方程的 coefficient matrix(系数矩阵)
其实我们把(3,1)带进去得到的就是
这是一个标准的矩阵乘法
而对于矩阵乘法 其实也对应着row和column两种视角
对于row picture的视角,其实是点乘,或者说左行,是对(1,3)行做了变换
对于column picture的视角,实际上就是线性组合
这点在前面的Chapter 1 Introduce to Vectors其实提到了
下面其实是看了一个Three Equations in Three Unknowns的情况
row picture:
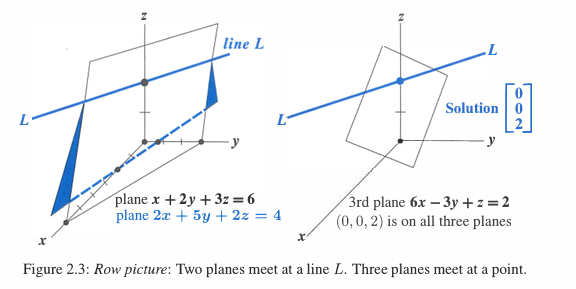
其实上升到三维对于找三条平面的交点 就已经比较困难了
相比之下,column picture的视角就很简单很多,是对三个三维向量的 向量加法
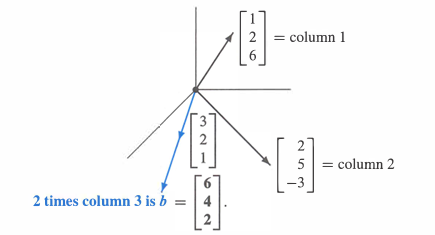
同样的